
ਇੱਕ ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸਮੋਟਰਇਹ ਇੱਕ ਕਿਸਮ ਦੀ ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਹੈ ਜੋ 380V ਤਿੰਨ-ਪੜਾਅ ਵਾਲੇ AC ਕਰੰਟ (120 ਡਿਗਰੀ ਦਾ ਪੜਾਅ ਅੰਤਰ) ਨੂੰ ਇੱਕੋ ਸਮੇਂ ਜੋੜ ਕੇ ਸੰਚਾਲਿਤ ਹੁੰਦੀ ਹੈ। ਇਸ ਤੱਥ ਦੇ ਕਾਰਨ ਕਿ ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦਾ ਰੋਟਰ ਅਤੇ ਸਟੇਟਰ ਘੁੰਮਦਾ ਚੁੰਬਕੀ ਖੇਤਰ ਇੱਕੋ ਦਿਸ਼ਾ ਵਿੱਚ ਅਤੇ ਵੱਖ-ਵੱਖ ਗਤੀਆਂ 'ਤੇ ਘੁੰਮਦਾ ਹੈ, ਇੱਕ ਸਲਿੱਪ ਰੇਟ ਹੁੰਦਾ ਹੈ, ਇਸ ਲਈ ਇਸਨੂੰ ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
ਤਿੰਨ-ਪੜਾਅ ਵਾਲੇ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੇ ਰੋਟਰ ਦੀ ਗਤੀ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਗਤੀ ਨਾਲੋਂ ਘੱਟ ਹੁੰਦੀ ਹੈ। ਰੋਟਰ ਵਿੰਡਿੰਗ ਚੁੰਬਕੀ ਖੇਤਰ ਨਾਲ ਸਾਪੇਖਿਕ ਗਤੀ ਦੇ ਕਾਰਨ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਅਤੇ ਕਰੰਟ ਪੈਦਾ ਕਰਦੀ ਹੈ, ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨਾਲ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਪਾ ਕੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟਾਰਕ ਪੈਦਾ ਕਰਦੀ ਹੈ, ਊਰਜਾ ਪਰਿਵਰਤਨ ਪ੍ਰਾਪਤ ਕਰਦੀ ਹੈ।
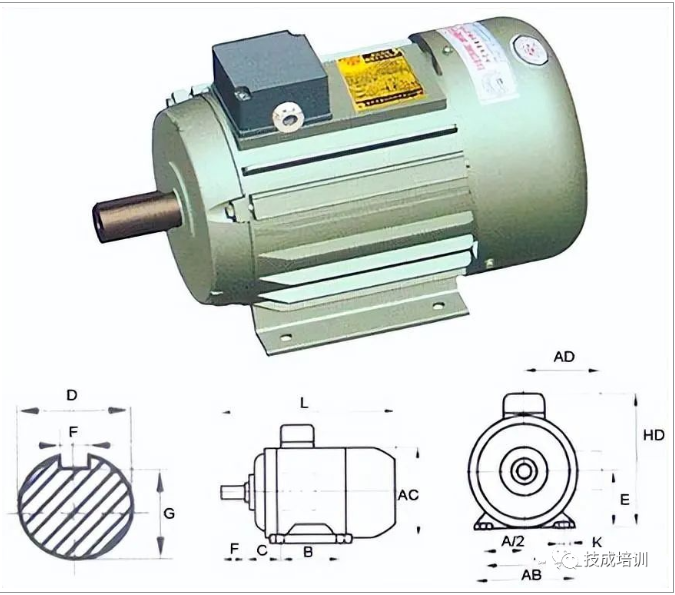
ਸਿੰਗਲ-ਫੇਜ਼ ਅਸਿੰਕ੍ਰੋਨਸ ਨਾਲ ਤੁਲਨਾ ਕੀਤੀ ਗਈਮੋਟਰਾਂ, ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸਮੋਟਰਾਂਬਿਹਤਰ ਓਪਰੇਟਿੰਗ ਪ੍ਰਦਰਸ਼ਨ ਹੈ ਅਤੇ ਵੱਖ-ਵੱਖ ਸਮੱਗਰੀਆਂ ਨੂੰ ਬਚਾ ਸਕਦਾ ਹੈ।
ਵੱਖ-ਵੱਖ ਰੋਟਰ ਬਣਤਰਾਂ ਦੇ ਅਨੁਸਾਰ, ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਨੂੰ ਪਿੰਜਰੇ ਦੀ ਕਿਸਮ ਅਤੇ ਜ਼ਖ਼ਮ ਦੀ ਕਿਸਮ ਵਿੱਚ ਵੰਡਿਆ ਜਾ ਸਕਦਾ ਹੈ।
ਪਿੰਜਰੇ ਦੇ ਰੋਟਰ ਵਾਲੀ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੀ ਇੱਕ ਸਧਾਰਨ ਬਣਤਰ, ਭਰੋਸੇਯੋਗ ਸੰਚਾਲਨ, ਹਲਕਾ ਭਾਰ ਅਤੇ ਘੱਟ ਕੀਮਤ ਹੈ, ਜਿਸਦੀ ਵਿਆਪਕ ਤੌਰ 'ਤੇ ਵਰਤੋਂ ਕੀਤੀ ਗਈ ਹੈ। ਇਸਦੀ ਮੁੱਖ ਕਮਜ਼ੋਰੀ ਗਤੀ ਨਿਯਮਨ ਵਿੱਚ ਮੁਸ਼ਕਲ ਹੈ।
ਇੱਕ ਜ਼ਖ਼ਮ ਵਾਲੀ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੀ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੇ ਰੋਟਰ ਅਤੇ ਸਟੇਟਰ ਵੀ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੀਆਂ ਵਿੰਡਿੰਗਾਂ ਨਾਲ ਲੈਸ ਹੁੰਦੇ ਹਨ ਅਤੇ ਸਲਿੱਪ ਰਿੰਗਾਂ, ਬੁਰਸ਼ਾਂ ਰਾਹੀਂ ਇੱਕ ਬਾਹਰੀ ਰੀਓਸਟੈਟ ਨਾਲ ਜੁੜੇ ਹੁੰਦੇ ਹਨ। ਰੀਓਸਟੈਟ ਦੇ ਵਿਰੋਧ ਨੂੰ ਅਨੁਕੂਲ ਕਰਨ ਨਾਲ ਮੋਟਰ ਦੀ ਸ਼ੁਰੂਆਤੀ ਕਾਰਗੁਜ਼ਾਰੀ ਵਿੱਚ ਸੁਧਾਰ ਹੋ ਸਕਦਾ ਹੈ ਅਤੇ ਮੋਟਰ ਦੀ ਗਤੀ ਨੂੰ ਅਨੁਕੂਲ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦਾ ਕਾਰਜਸ਼ੀਲ ਸਿਧਾਂਤ
ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਸਟੇਟਰ ਵਿੰਡਿੰਗ 'ਤੇ ਸਮਮਿਤੀ ਤਿੰਨ-ਪੜਾਅ ਬਦਲਵੇਂ ਕਰੰਟ ਨੂੰ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇੱਕ ਘੁੰਮਦਾ ਚੁੰਬਕੀ ਖੇਤਰ ਪੈਦਾ ਹੁੰਦਾ ਹੈ ਜੋ ਸਟੇਟਰ ਅਤੇ ਰੋਟਰ ਦੇ ਅੰਦਰੂਨੀ ਗੋਲਾਕਾਰ ਸਪੇਸ ਦੇ ਨਾਲ ਸਮਕਾਲੀ ਗਤੀ n1 'ਤੇ ਘੜੀ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਦਾ ਹੈ।
ਕਿਉਂਕਿ ਘੁੰਮਦਾ ਚੁੰਬਕੀ ਖੇਤਰ n1 ਗਤੀ 'ਤੇ ਘੁੰਮਦਾ ਹੈ, ਇਸ ਲਈ ਰੋਟਰ ਕੰਡਕਟਰ ਸ਼ੁਰੂਆਤ ਵਿੱਚ ਸਥਿਰ ਹੁੰਦਾ ਹੈ, ਇਸ ਲਈ ਰੋਟਰ ਕੰਡਕਟਰ ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਪੈਦਾ ਕਰਨ ਲਈ ਸਟੇਟਰ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਕੱਟ ਦੇਵੇਗਾ (ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਦੀ ਦਿਸ਼ਾ ਸੱਜੇ-ਹੱਥ ਨਿਯਮ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ)।
ਰੋਟਰ ਕੰਡਕਟਰ ਦੇ ਦੋਵਾਂ ਸਿਰਿਆਂ 'ਤੇ ਸ਼ਾਰਟ-ਸਰਕਟ ਰਿੰਗ ਦੁਆਰਾ ਸ਼ਾਰਟ ਸਰਕਟ ਹੋਣ ਕਾਰਨ, ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਦੀ ਕਿਰਿਆ ਦੇ ਅਧੀਨ, ਰੋਟਰ ਕੰਡਕਟਰ ਇੱਕ ਪ੍ਰੇਰਿਤ ਕਰੰਟ ਪੈਦਾ ਕਰੇਗਾ ਜੋ ਮੂਲ ਰੂਪ ਵਿੱਚ ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਦੇ ਸਮਾਨ ਦਿਸ਼ਾ ਵਿੱਚ ਹੁੰਦਾ ਹੈ। ਰੋਟਰ ਦਾ ਕਰੰਟ ਲੈ ਜਾਣ ਵਾਲਾ ਕੰਡਕਟਰ ਸਟੇਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਬਲ ਦੇ ਅਧੀਨ ਹੁੰਦਾ ਹੈ (ਬਲ ਦੀ ਦਿਸ਼ਾ ਖੱਬੇ-ਹੱਥ ਦੇ ਨਿਯਮ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ)। ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਬਲ ਰੋਟਰ ਸ਼ਾਫਟ 'ਤੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟਾਰਕ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਰੋਟਰ ਨੂੰ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਣ ਲਈ ਪ੍ਰੇਰਿਤ ਕਰਦਾ ਹੈ।
ਉਪਰੋਕਤ ਵਿਸ਼ਲੇਸ਼ਣ ਦੁਆਰਾ, ਇਹ ਸਿੱਟਾ ਕੱਢਿਆ ਜਾ ਸਕਦਾ ਹੈ ਕਿ ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦਾ ਕੰਮ ਕਰਨ ਦਾ ਸਿਧਾਂਤ ਇਸ ਪ੍ਰਕਾਰ ਹੈ: ਜਦੋਂ ਮੋਟਰ ਦੇ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੇ ਸਟੇਟਰ ਵਿੰਡਿੰਗ (ਹਰੇਕ ਵਿੱਚ 120 ਡਿਗਰੀ ਇਲੈਕਟ੍ਰੀਕਲ ਐਂਗਲ ਫਰਕ ਹੁੰਦਾ ਹੈ) ਨੂੰ ਤਿੰਨ-ਪੜਾਅ ਸਮਮਿਤੀ ਵਿਕਲਪਕ ਕਰੰਟ ਨਾਲ ਖੁਆਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇੱਕ ਘੁੰਮਦਾ ਚੁੰਬਕੀ ਖੇਤਰ ਪੈਦਾ ਹੁੰਦਾ ਹੈ, ਜੋ ਰੋਟਰ ਵਿੰਡਿੰਗ ਨੂੰ ਕੱਟਦਾ ਹੈ ਅਤੇ ਰੋਟਰ ਵਿੰਡਿੰਗ ਵਿੱਚ ਪ੍ਰੇਰਿਤ ਕਰੰਟ ਪੈਦਾ ਕਰਦਾ ਹੈ (ਰੋਟਰ ਵਿੰਡਿੰਗ ਇੱਕ ਬੰਦ ਸਰਕਟ ਹੈ)। ਕਰੰਟ ਚੁੱਕਣ ਵਾਲਾ ਰੋਟਰ ਕੰਡਕਟਰ ਸਟੇਟਰ ਘੁੰਮਣ ਵਾਲੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਕਿਰਿਆ ਦੇ ਅਧੀਨ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਬਲ ਪੈਦਾ ਕਰੇਗਾ, ਇਸ ਤਰ੍ਹਾਂ, ਮੋਟਰ ਸ਼ਾਫਟ 'ਤੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟਾਰਕ ਬਣਦਾ ਹੈ, ਜੋ ਮੋਟਰ ਨੂੰ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਵਾਂਗ ਹੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਾਉਣ ਲਈ ਪ੍ਰੇਰਿਤ ਕਰਦਾ ਹੈ।
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦਾ ਵਾਇਰਿੰਗ ਡਾਇਗ੍ਰਾਮ
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਦੀ ਮੁੱਢਲੀ ਵਾਇਰਿੰਗ:
ਤਿੰਨ-ਪੜਾਅ ਵਾਲੀ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੀ ਵਿੰਡਿੰਗ ਤੋਂ ਛੇ ਤਾਰਾਂ ਨੂੰ ਦੋ ਬੁਨਿਆਦੀ ਕੁਨੈਕਸ਼ਨ ਤਰੀਕਿਆਂ ਵਿੱਚ ਵੰਡਿਆ ਜਾ ਸਕਦਾ ਹੈ: ਡੈਲਟਾ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਅਤੇ ਸਟਾਰ ਕਨੈਕਸ਼ਨ।
ਛੇ ਤਾਰਾਂ = ਤਿੰਨ ਮੋਟਰ ਵਿੰਡਿੰਗਜ਼ = ਤਿੰਨ ਹੈੱਡ ਐਂਡ + ਤਿੰਨ ਟੇਲ ਐਂਡ, ਇੱਕ ਮਲਟੀਮੀਟਰ ਨਾਲ ਜੋ ਇੱਕੋ ਵਿੰਡਿੰਗ ਦੇ ਹੈੱਡ ਅਤੇ ਟੇਲ ਐਂਡ ਦੇ ਵਿਚਕਾਰ ਕਨੈਕਸ਼ਨ ਨੂੰ ਮਾਪਦਾ ਹੈ, ਭਾਵ U1-U2, V1-V2, W1-W2।
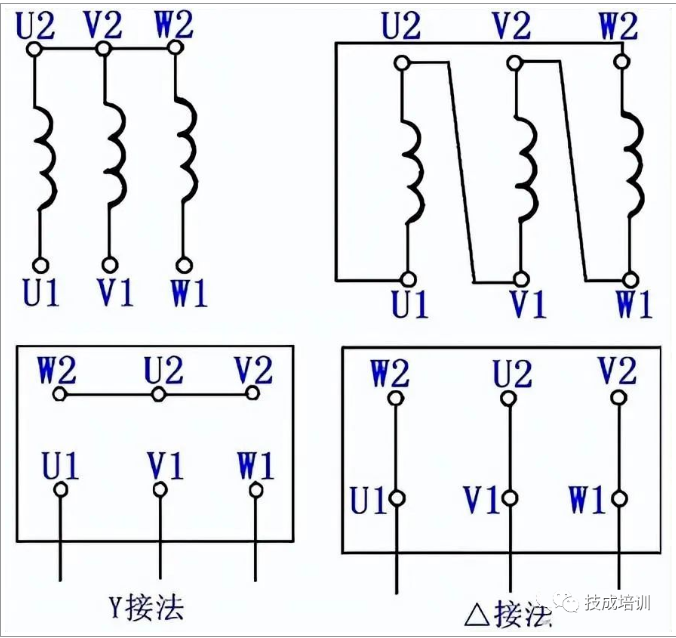
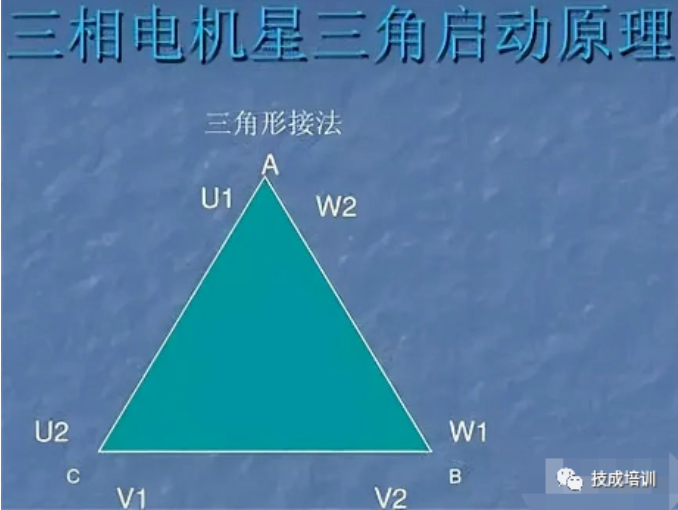
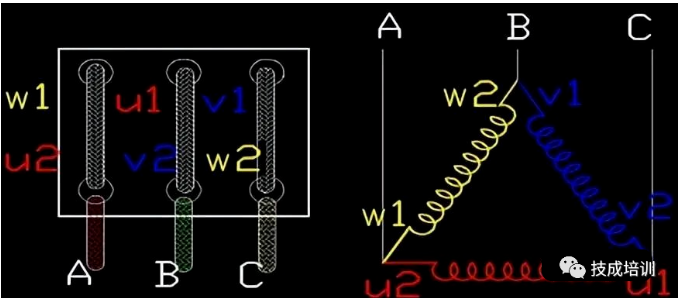
1. ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਲਈ ਤਿਕੋਣ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ
ਤਿਕੋਣ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਤਿੰਨ ਵਿੰਡਿੰਗਾਂ ਦੇ ਸਿਰਾਂ ਅਤੇ ਪੂਛਾਂ ਨੂੰ ਕ੍ਰਮ ਵਿੱਚ ਜੋੜ ਕੇ ਇੱਕ ਤਿਕੋਣ ਬਣਾਉਣਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ:
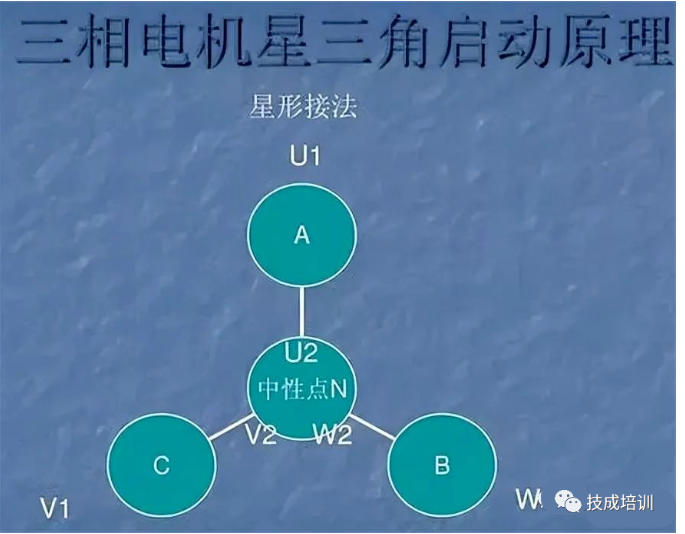
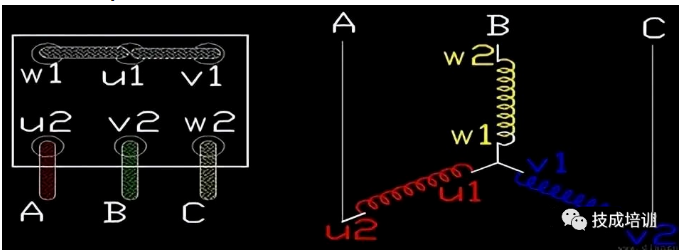
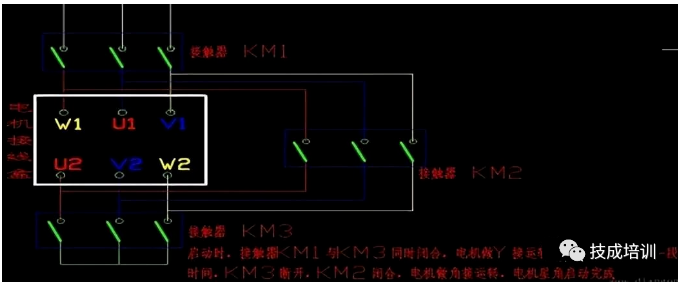
2. ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਲਈ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ
ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਤਿੰਨ ਵਿੰਡਿੰਗਾਂ ਦੇ ਟੇਲ ਜਾਂ ਹੈੱਡ ਐਂਡ ਨੂੰ ਜੋੜਨਾ ਹੈ, ਅਤੇ ਬਾਕੀ ਤਿੰਨ ਤਾਰਾਂ ਨੂੰ ਪਾਵਰ ਕਨੈਕਸ਼ਨ ਵਜੋਂ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ। ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਕਨੈਕਸ਼ਨ ਵਿਧੀ:
ਤਿੰਨ ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੇ ਵਾਇਰਿੰਗ ਡਾਇਗ੍ਰਾਮ ਦੀ ਵਿਆਖਿਆ ਚਿੱਤਰਾਂ ਅਤੇ ਟੈਕਸਟ ਵਿੱਚ
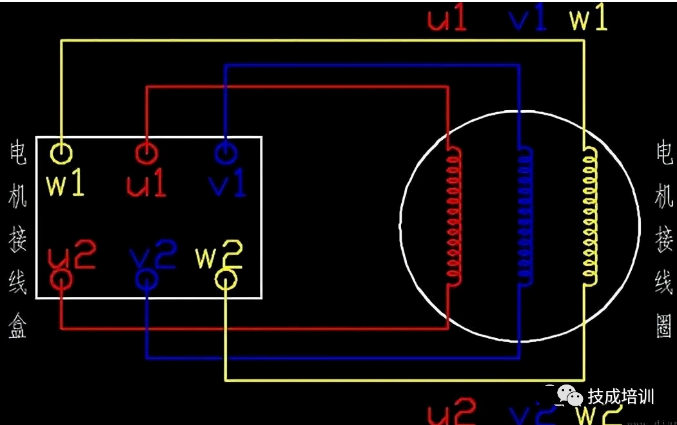
ਤਿੰਨ ਪੜਾਅ ਮੋਟਰ ਜੰਕਸ਼ਨ ਬਾਕਸ
ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੀ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਜੁੜੀ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਜੰਕਸ਼ਨ ਬਾਕਸ ਵਿੱਚ ਕਨੈਕਟਿੰਗ ਟੁਕੜੇ ਦਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਇਸ ਪ੍ਰਕਾਰ ਹੈ:
ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੀ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਕੋਨੇ ਨਾਲ ਜੁੜੀ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਜੰਕਸ਼ਨ ਬਾਕਸ ਕਨੈਕਸ਼ਨ ਟੁਕੜੇ ਦਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਇਸ ਪ੍ਰਕਾਰ ਹੈ:
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਲਈ ਦੋ ਕਨੈਕਸ਼ਨ ਤਰੀਕੇ ਹਨ: ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਅਤੇ ਟ੍ਰਾਈਐਂਗਲ ਕਨੈਕਸ਼ਨ।
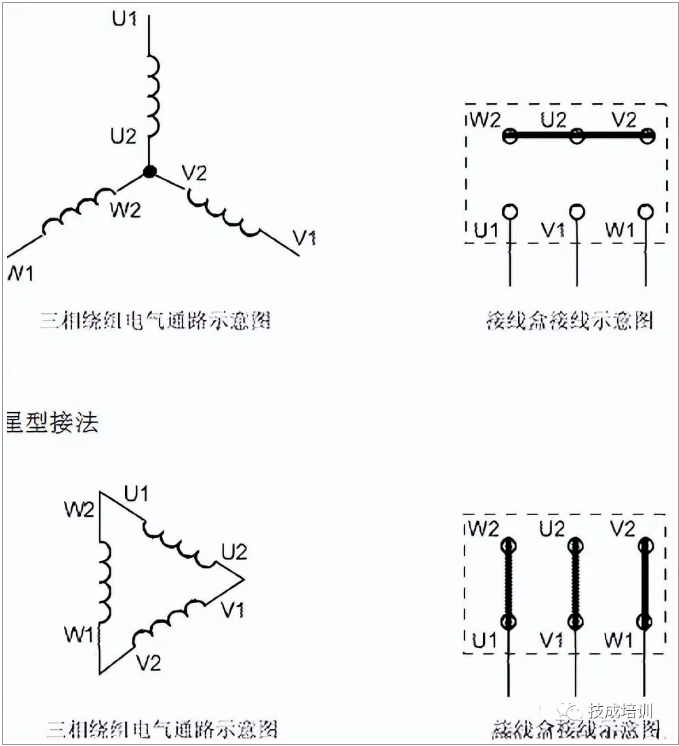
ਤਿਕੋਣ ਵਿਧੀ
ਇੱਕੋ ਵੋਲਟੇਜ ਅਤੇ ਤਾਰ ਵਿਆਸ ਵਾਲੇ ਵਾਇਨਿੰਗ ਕੋਇਲਾਂ ਵਿੱਚ, ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਵਿੱਚ ਪ੍ਰਤੀ ਪੜਾਅ ਤਿੰਨ ਗੁਣਾ ਘੱਟ ਮੋੜ (1.732 ਗੁਣਾ) ਅਤੇ ਤਿਕੋਣ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨਾਲੋਂ ਤਿੰਨ ਗੁਣਾ ਘੱਟ ਪਾਵਰ ਹੁੰਦੀ ਹੈ। ਮੁਕੰਮਲ ਮੋਟਰ ਦੇ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨੂੰ 380V ਦੇ ਵੋਲਟੇਜ ਦਾ ਸਾਹਮਣਾ ਕਰਨ ਲਈ ਫਿਕਸ ਕੀਤਾ ਗਿਆ ਹੈ ਅਤੇ ਆਮ ਤੌਰ 'ਤੇ ਸੋਧ ਲਈ ਢੁਕਵਾਂ ਨਹੀਂ ਹੁੰਦਾ।
ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨੂੰ ਸਿਰਫ਼ ਉਦੋਂ ਹੀ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਵੋਲਟੇਜ ਪੱਧਰ ਆਮ 380V ਤੋਂ ਵੱਖਰਾ ਹੁੰਦਾ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਵੋਲਟੇਜ ਪੱਧਰ 220V ਹੁੰਦਾ ਹੈ, ਤਾਂ ਮੂਲ ਤਿੰਨ-ਪੜਾਅ ਵੋਲਟੇਜ 380V ਦੇ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨੂੰ ਤਿਕੋਣ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਵਿੱਚ ਬਦਲਣਾ ਲਾਗੂ ਹੋ ਸਕਦਾ ਹੈ; ਜਦੋਂ ਤਿੰਨ-ਪੜਾਅ ਵੋਲਟੇਜ ਪੱਧਰ 660V ਹੁੰਦਾ ਹੈ, ਤਾਂ ਮੂਲ ਤਿੰਨ-ਪੜਾਅ ਵੋਲਟੇਜ 380V ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨੂੰ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਵਿੱਚ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਅਤੇ ਇਸਦੀ ਸ਼ਕਤੀ ਬਦਲੀ ਨਹੀਂ ਜਾਂਦੀ। ਆਮ ਤੌਰ 'ਤੇ, ਘੱਟ-ਪਾਵਰ ਮੋਟਰਾਂ ਸਟਾਰ ਕਨੈਕਟ ਹੁੰਦੀਆਂ ਹਨ, ਜਦੋਂ ਕਿ ਉੱਚ-ਪਾਵਰ ਮੋਟਰਾਂ ਡੈਲਟਾ ਕਨੈਕਟ ਹੁੰਦੀਆਂ ਹਨ।
ਰੇਟਿਡ ਵੋਲਟੇਜ 'ਤੇ, ਇੱਕ ਡੈਲਟਾ ਕਨੈਕਟਡ ਮੋਟਰ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਣੀ ਚਾਹੀਦੀ ਹੈ। ਜੇਕਰ ਇਸਨੂੰ ਸਟਾਰ ਕਨੈਕਟਡ ਮੋਟਰ ਵਿੱਚ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇਹ ਘਟੀ ਹੋਈ ਵੋਲਟੇਜ ਓਪਰੇਸ਼ਨ ਨਾਲ ਸਬੰਧਤ ਹੈ, ਜਿਸਦੇ ਨਤੀਜੇ ਵਜੋਂ ਮੋਟਰ ਪਾਵਰ ਅਤੇ ਸਟਾਰਟਿੰਗ ਕਰੰਟ ਵਿੱਚ ਕਮੀ ਆਉਂਦੀ ਹੈ। ਇੱਕ ਹਾਈ-ਪਾਵਰ ਮੋਟਰ (ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ) ਸ਼ੁਰੂ ਕਰਦੇ ਸਮੇਂ, ਕਰੰਟ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੁੰਦਾ ਹੈ। ਲਾਈਨ 'ਤੇ ਸ਼ੁਰੂਆਤੀ ਕਰੰਟ ਦੇ ਪ੍ਰਭਾਵ ਨੂੰ ਘਟਾਉਣ ਲਈ, ਆਮ ਤੌਰ 'ਤੇ ਸਟੈਪ-ਡਾਊਨ ਸਟਾਰਟਿੰਗ ਅਪਣਾਈ ਜਾਂਦੀ ਹੈ। ਇੱਕ ਤਰੀਕਾ ਹੈ ਮੂਲ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਨੂੰ ਸਟਾਰਟਿੰਗ ਲਈ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਵਿੱਚ ਬਦਲਣਾ। ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਸ਼ੁਰੂ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਇਸਨੂੰ ਓਪਰੇਸ਼ਨ ਲਈ ਵਾਪਸ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਵਿਧੀ ਵਿੱਚ ਬਦਲ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ।
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦਾ ਵਾਇਰਿੰਗ ਡਾਇਗ੍ਰਾਮ
ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰਾਂ ਲਈ ਅੱਗੇ ਅਤੇ ਉਲਟ ਟ੍ਰਾਂਸਫਰ ਲਾਈਨਾਂ ਦਾ ਭੌਤਿਕ ਚਿੱਤਰ:
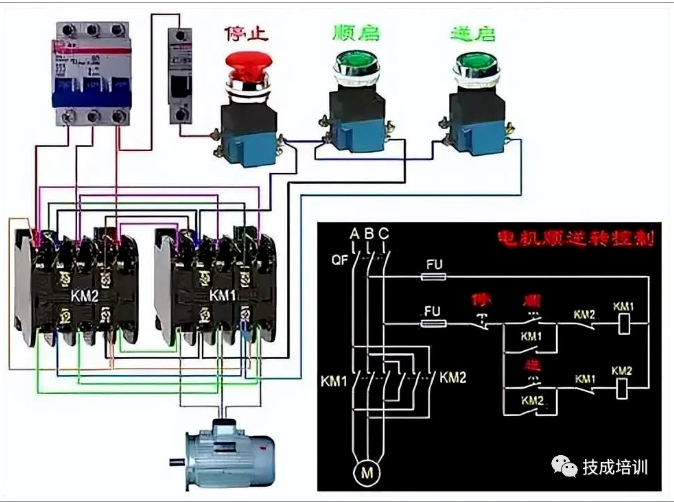
ਮੋਟਰ ਦੇ ਅੱਗੇ ਅਤੇ ਉਲਟ ਕੰਟਰੋਲ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ, ਇਸਦੀ ਪਾਵਰ ਸਪਲਾਈ ਦੇ ਕਿਸੇ ਵੀ ਦੋ ਪੜਾਵਾਂ ਨੂੰ ਇੱਕ ਦੂਜੇ ਦੇ ਸਾਪੇਖਿਕ ਤੌਰ 'ਤੇ ਐਡਜਸਟ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ (ਅਸੀਂ ਇਸਨੂੰ ਕਮਿਊਟੇਸ਼ਨ ਕਹਿੰਦੇ ਹਾਂ)। ਆਮ ਤੌਰ 'ਤੇ, V ਪੜਾਅ ਬਦਲਿਆ ਨਹੀਂ ਜਾਂਦਾ, ਅਤੇ U ਪੜਾਅ ਅਤੇ W ਪੜਾਅ ਇੱਕ ਦੂਜੇ ਦੇ ਸਾਪੇਖਿਕ ਤੌਰ 'ਤੇ ਐਡਜਸਟ ਕੀਤੇ ਜਾਂਦੇ ਹਨ। ਇਹ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਕਿ ਜਦੋਂ ਦੋ ਸੰਪਰਕਕਰਤਾ ਕੰਮ ਕਰਦੇ ਹਨ ਤਾਂ ਮੋਟਰ ਦੇ ਪੜਾਅ ਕ੍ਰਮ ਨੂੰ ਭਰੋਸੇਯੋਗ ਢੰਗ ਨਾਲ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਵਾਇਰਿੰਗ ਸੰਪਰਕ ਦੇ ਉੱਪਰਲੇ ਪੋਰਟ 'ਤੇ ਇਕਸਾਰ ਹੋਣੀ ਚਾਹੀਦੀ ਹੈ, ਅਤੇ ਪੜਾਅ ਨੂੰ ਸੰਪਰਕਕਰਤਾ ਦੇ ਹੇਠਲੇ ਪੋਰਟ 'ਤੇ ਐਡਜਸਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਦੋ ਪੜਾਵਾਂ ਦੇ ਪੜਾਅ ਕ੍ਰਮ ਦੀ ਅਦਲਾ-ਬਦਲੀ ਦੇ ਕਾਰਨ, ਇਹ ਯਕੀਨੀ ਬਣਾਉਣਾ ਜ਼ਰੂਰੀ ਹੈ ਕਿ ਦੋ KM ਕੋਇਲਾਂ ਨੂੰ ਇੱਕੋ ਸਮੇਂ ਚਾਲੂ ਨਹੀਂ ਕੀਤਾ ਜਾ ਸਕਦਾ, ਨਹੀਂ ਤਾਂ ਗੰਭੀਰ ਪੜਾਅ ਤੋਂ ਪੜਾਅ ਸ਼ਾਰਟ ਸਰਕਟ ਨੁਕਸ ਹੋ ਸਕਦੇ ਹਨ। ਇਸ ਲਈ, ਇੰਟਰਲੌਕਿੰਗ ਨੂੰ ਅਪਣਾਇਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।
ਸੁਰੱਖਿਆ ਕਾਰਨਾਂ ਕਰਕੇ, ਬਟਨ ਇੰਟਰਲੌਕਿੰਗ (ਮਕੈਨੀਕਲ) ਅਤੇ ਕੰਟੈਕਟਰ ਇੰਟਰਲੌਕਿੰਗ (ਇਲੈਕਟ੍ਰੀਕਲ) ਦੇ ਨਾਲ ਇੱਕ ਡਬਲ ਇੰਟਰਲੌਕਿੰਗ ਫਾਰਵਰਡ ਅਤੇ ਰਿਵਰਸ ਕੰਟਰੋਲ ਸਰਕਟ ਅਕਸਰ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ; ਬਟਨ ਇੰਟਰਲੌਕਿੰਗ ਦੀ ਵਰਤੋਂ ਕਰਕੇ, ਭਾਵੇਂ ਫਾਰਵਰਡ ਅਤੇ ਰਿਵਰਸ ਬਟਨ ਇੱਕੋ ਸਮੇਂ ਦਬਾਏ ਜਾਣ, ਫੇਜ਼ ਐਡਜਸਟਮੈਂਟ ਲਈ ਵਰਤੇ ਗਏ ਦੋ ਸੰਪਰਕਕਰਤਾ ਇੱਕੋ ਸਮੇਂ ਚਾਲੂ ਨਹੀਂ ਕੀਤੇ ਜਾ ਸਕਦੇ, ਮਕੈਨੀਕਲ ਤੌਰ 'ਤੇ ਪੜਾਅ ਤੋਂ ਪੜਾਅ ਦੇ ਸ਼ਾਰਟ ਸਰਕਟਾਂ ਤੋਂ ਬਚਦੇ ਹਨ।
ਇਸ ਤੋਂ ਇਲਾਵਾ, ਲਾਗੂ ਕੀਤੇ ਗਏ ਸੰਪਰਕਕਰਤਾਵਾਂ ਦੇ ਇੰਟਰਲਾਕਿੰਗ ਦੇ ਕਾਰਨ, ਜਿੰਨਾ ਚਿਰ ਇੱਕ ਸੰਪਰਕਕਰਤਾ ਚਾਲੂ ਹੈ, ਉਸਦਾ ਲੰਮਾ ਬੰਦ ਸੰਪਰਕ ਬੰਦ ਨਹੀਂ ਹੋਵੇਗਾ। ਇਸ ਤਰ੍ਹਾਂ, ਮਕੈਨੀਕਲ ਅਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਡੁਅਲ ਇੰਟਰਲਾਕਿੰਗ ਦੇ ਉਪਯੋਗ ਵਿੱਚ, ਮੋਟਰ ਦੇ ਪਾਵਰ ਸਪਲਾਈ ਸਿਸਟਮ ਵਿੱਚ ਪੜਾਅ ਤੋਂ ਪੜਾਅ ਸ਼ਾਰਟ ਸਰਕਟ ਨਹੀਂ ਹੋ ਸਕਦੇ, ਮੋਟਰ ਨੂੰ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਢੰਗ ਨਾਲ ਸੁਰੱਖਿਅਤ ਕਰਦੇ ਹਨ ਅਤੇ ਪੜਾਅ ਮੋਡੂਲੇਸ਼ਨ ਦੌਰਾਨ ਪੜਾਅ ਤੋਂ ਪੜਾਅ ਸ਼ਾਰਟ ਸਰਕਟਾਂ ਕਾਰਨ ਹੋਣ ਵਾਲੇ ਹਾਦਸਿਆਂ ਤੋਂ ਬਚਦੇ ਹਨ, ਜੋ ਸੰਪਰਕਕਰਤਾ ਨੂੰ ਸਾੜ ਸਕਦੇ ਹਨ।
ਪੋਸਟ ਸਮਾਂ: ਅਗਸਤ-07-2023


